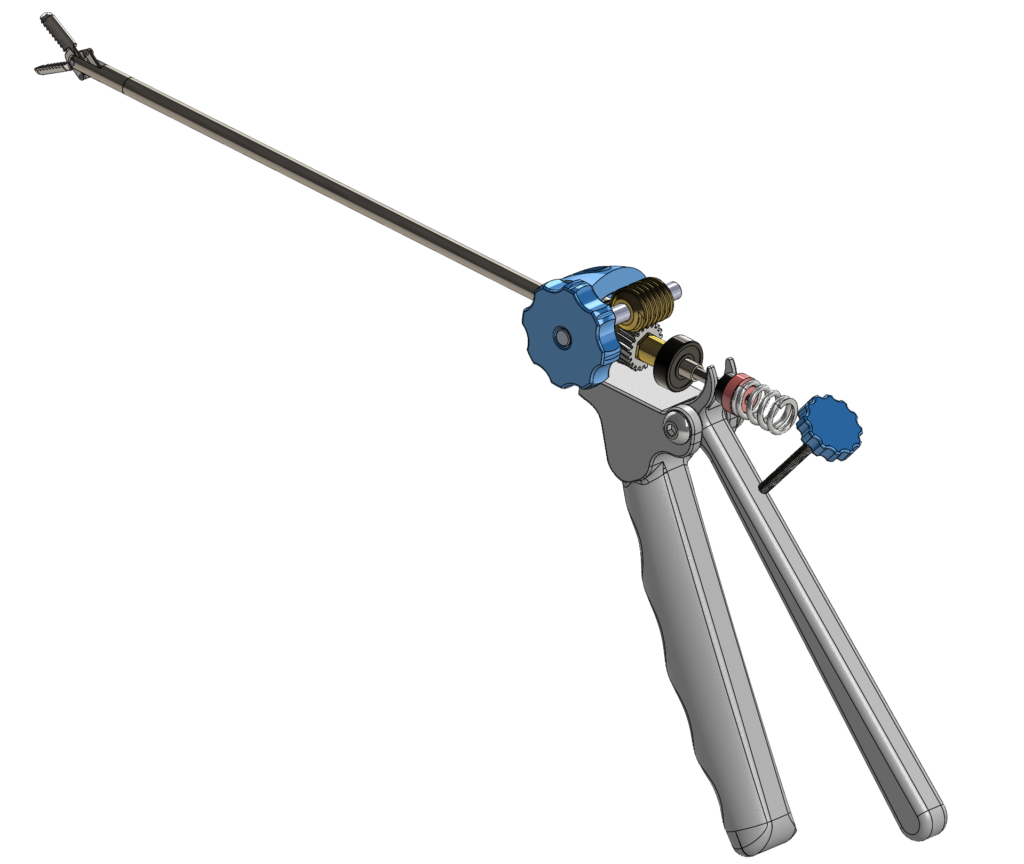
Challenged with designing a grasping tool for arthroscopic surgery, I was further asked to incorporate an additional degree of freedom into the jaws. Using an ergonomically packaged worm gear assembly, I met the design goal with jaws that can be precision rotated using a thumb wheel, and are immune to back-turning for added stability and control.
GoPro twist-lock mounts
The goal was to generate a few concepts for new GoPro camera mounts, each one offering twist-on, twist-off functionality. One design relies on interlocking annular snap features to provide closure, while the other makes use of a living hinge for a more secure connection.
Javagrip
Designed with the adventure motorcyclist in mind, Javagrip is a unique container for coffee beans or grounds. An o-ring provides an airtight seal, while a mechanical locking mechanism provides secure closure even in the harsh environment of off-road motorcycling.